埃莫为实现惯性平台稳定提供了完全即用的运动控制解决方案,无论是在地面、空中还是在海上。该解决方案由埃莫的标准“现货”运动控制产品组成。埃莫解决方案从控制器级陀螺仪信号输入,到高精度、高动态、高带宽伺服器,并可控制任意数量的运动轴,是一款轻巧而坚固的运动解决方案,可以随时随地稳定任何平台。
埃莫的先进多轴控制能力结合智能伺服驱动技术,可确保终极稳定性能,无需平台厂商开发专用的硬件或软件。凭借先进的控制功能如 SIL(软件在环),客户可利用自己的控制算法,简化设计流程并保护其敏感 IP。
小而轻的解决方案,配备高带宽和高效组网,使其成为实现极限惯性平台稳定的理想之选。

机载相机惯性稳定

海军雷达运动解决方案
空中卫星跟踪系统

方位角/仰角系统

空中卫星跟踪系统
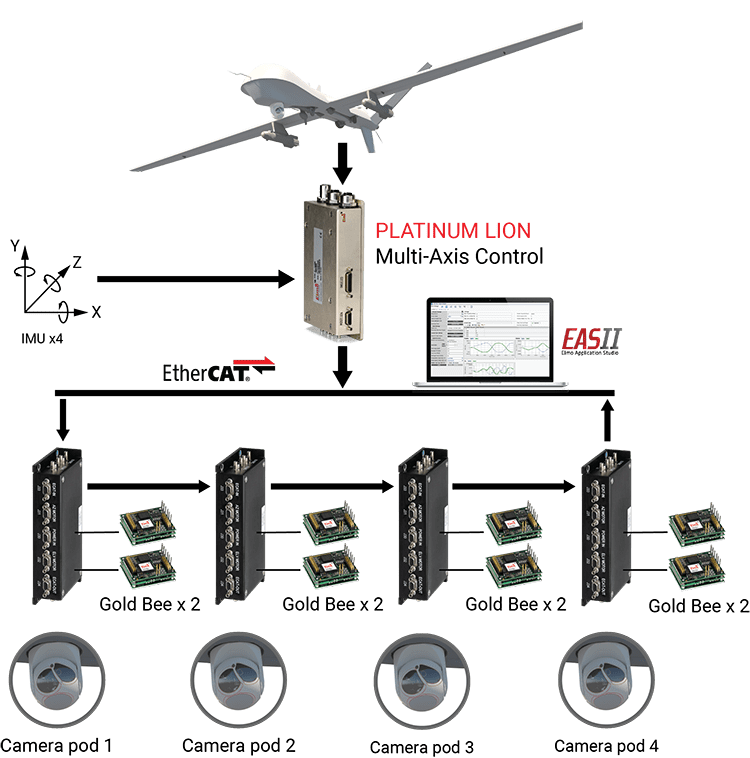

Platinum Lion (P-Lion) 多轴运动控制器
小而轻的控制器,设计用于以更高的连接性和灵活的开发环境来实现恶劣环境中的极限性能。其数字和模拟输入和输出可实现与加速度计、编码器、串行设备、惯性测量单元和陀螺仪之间的快速响应控制器级接口。利用 EtherCAT,多轴控制器最多可在四个惯性平台上实现不到 250 μs 的循环时间和高精度同步,抖动小于 5 μs。
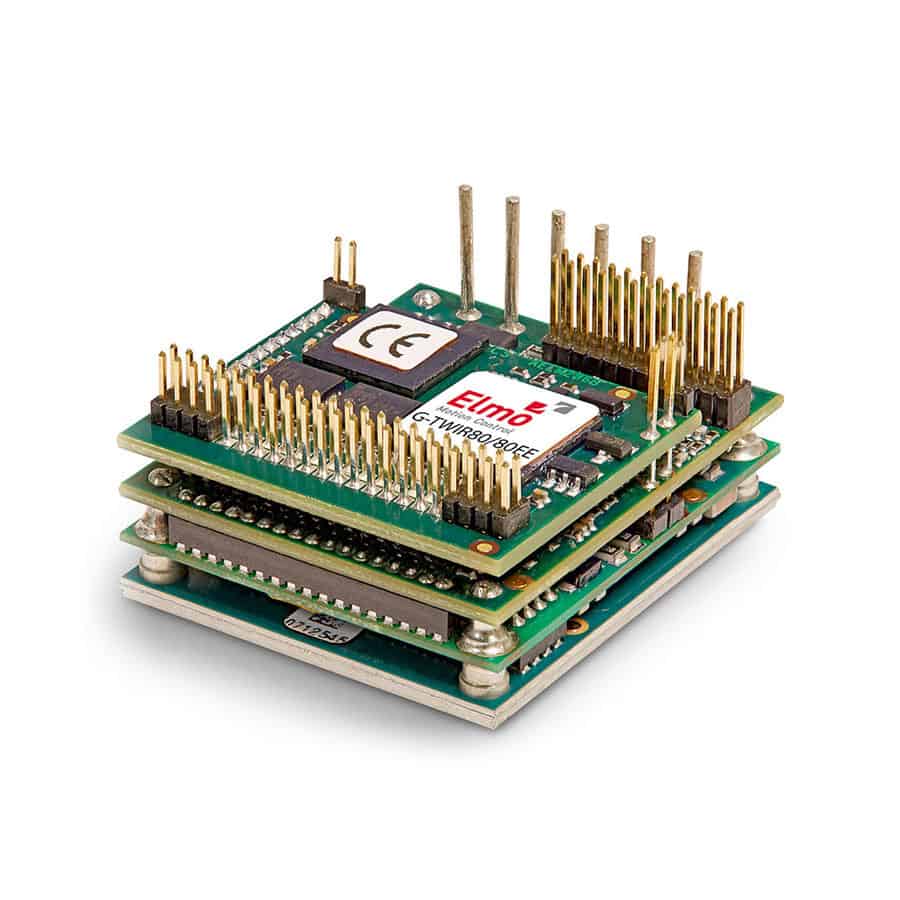
Gold 伺服驱动器
埃莫的强大高性能紧凑型伺服驱动器系列可提供大功率(10 W-65K W)、电压(10 V-900 V)和电流(1 A-650 A)选项,并且能够处理任何格式的反馈,从而确保快速而准确的调整和精确的同步。驱动器符合安全性、EMC 和环境标准,并通过了安全扭矩关断(IEC61800-5-2,STO)、安全完整性等级 3(SIL 3)和性能等级e(PLe)认证。

软件在环(SIL)控制能力
埃莫提供了一个“黑盒子”环境,用户可再次上传自己的运动学及控制设计和仿真代码并实时执行。P-Lion 中处理针对具体客户的设计,并且每隔 100-250 μs 经由确定性 EtherCAT 网络传输给伺服驱动器,启动电机的同步纠正措施。

埃莫应用工作室 II (EASII)软件根据
硬件采购中包含了行业领先的软件工具,可帮助用户快速创建并实施运动,同时轻松管理伺服驱动器和运动控制器。灵活且用户友好的界面和本机 IEC 61131-3 PLCopen 编程工具支持全部五种 IEC 语言,能够让用户轻松地以其首选语言编排整个开发过程,并快速优化系统性能。EASII 可产生精确的机械设备传输功能;1-D、2-D 和 3-D 误差映射及校正;驱动器反馈仿真;校正伺服调谐等。